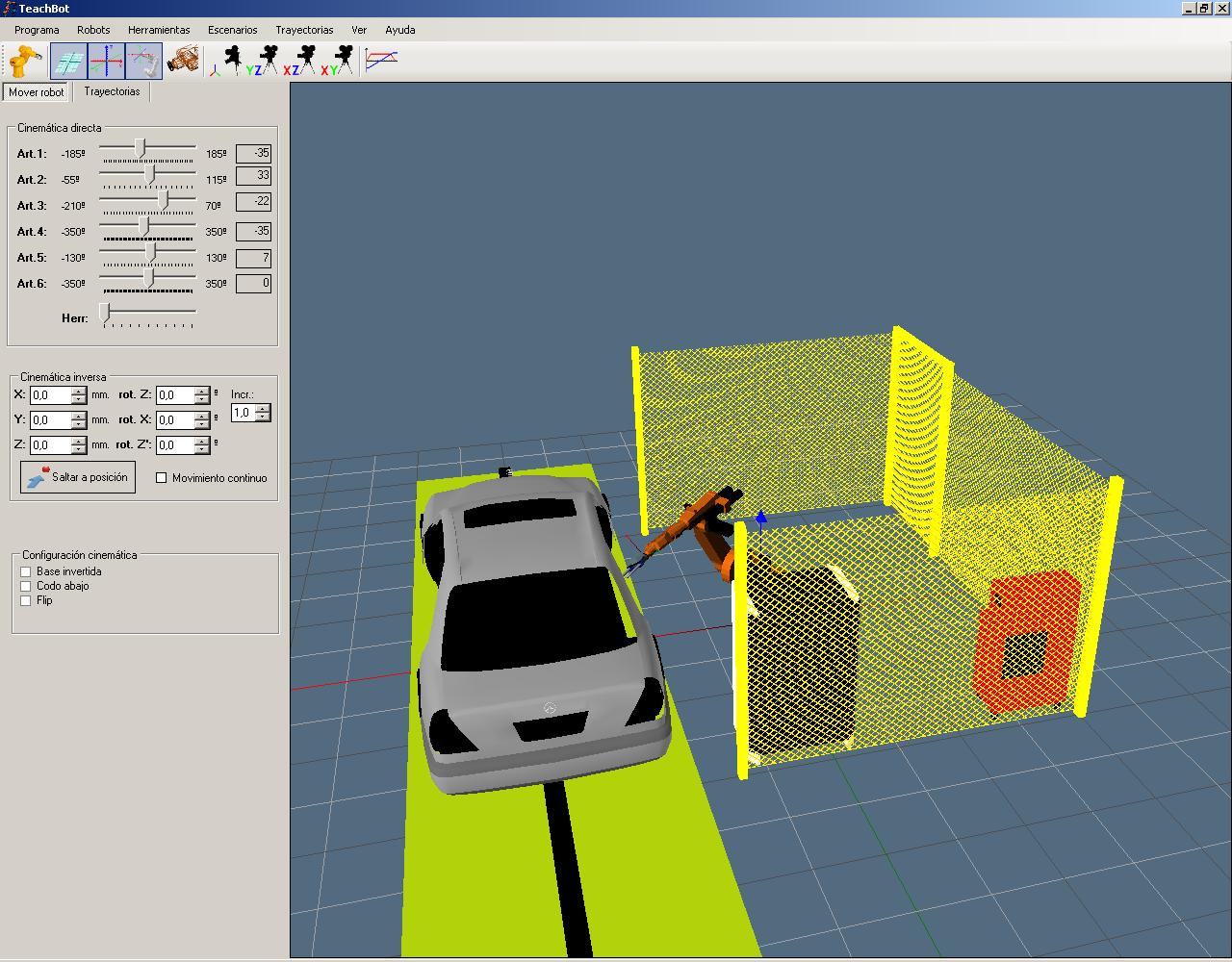
Las características implementadas son:
- Cinemática del robot KUKA KR6/2
- Generación de trayectorias (trapezoidales, cúbicas, rectilíneas de ajuste parabólico)
- Visualización en gráficas de posición, velocidad y aceleración de las articulaciones
- Carga de escenarios u objetos
- Uso de diferentes herramientas
- Simulación de gravedad y de colisiones
- Otros modelos de robot
- Interacción con el escenario
- Programación textual del robot
- Comunicación con el controlador del robot real... etc.

No hay comentarios:
Publicar un comentario